Настройка полетных режимов
У полетного контроллера ArduPilot в конфигурации ArduCopter APMCopter есть 14 полетных режимов, 10 из которых регулярно используются. Вы можете настроить их , выполнив следующие действия:
- Включите аппаратуру
- Подключите APM к ПО Mission Planner
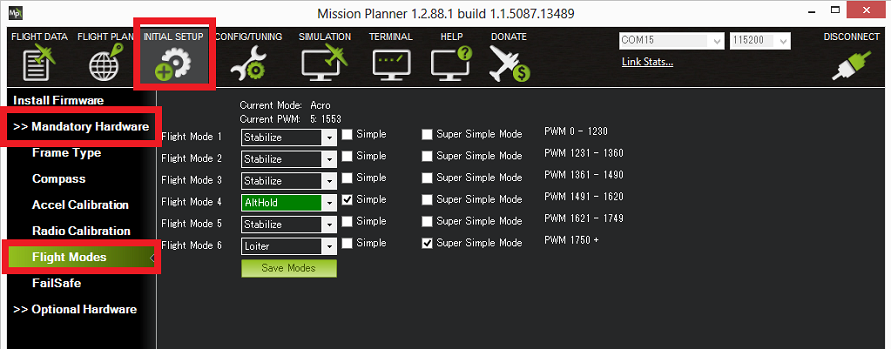
- Зайдите в раздел Initial Setup -> -> Flight Mode
- 5-й канал вашего передатчика отвечает за полетные режимы, зеленая полоса в ПО указывает текущий режим, при переключении на аппаратуре зеленая полоса будет перемещаться.
- Используя выпадающий список в каждом положении выберите полетный режим. По крайней мере один из режимов должен быть режим Стабилизации (Stabilize)
- При желании можно установить галочку Simple напротив каждого из режимов. В прошивке 3.1 и выше можно установить галочку "супер простой режим". Если будут установлены галочки на "простом" (Simple) и "Супер простом режиме" (Super Simple Mode) то будет использоваться "супер простой режим" (Super Simple Mode).
- Когда режимы установлены нажмите кнопку сохранения расположеную чуть ниже.
Когда вы начинаете использовать ArduPilot в конфигурации ArduCopter вы должны прогрессировать через полетные режимы в порядке указанном ниже, будучи уверенным, что вы знакомы с текущем перед переходом к следующему. Нажмите на любой из режимов полета ниже для детальной информации о нем:
- Стабилизация (Stabilize)
- Удержание высоты (AltHold)
- Слонятся (Loiter & OF_loiter)
- Вернуться на точку старта (RTL)
- Автоматический (Auto)
Дополнительные режимы полета
- Акробатика (Acro)
- Полет по кругу (Circle)
- Режим самолета (Drift)
- Следуй за мной (Follow Me)
- Спорт (Sport)
- Полет на указанную точку (Guided)
- Позиция с ручным газом (Position)
- Автоматическая посадка (Land)
- Простой и супер простой режим (Simple / Super simple)
Большинство аппаратур имеют 3х позиционный переключатель, но вы можете ознакомится с инструкцией по настройке 6-типозиционного переключения.
Если вы не хотите использовать Mission Planer вы можете установить полетные режимы через интерфейс командной строки CLI
С небольшими изменениями кода по настройке пользовательских полетных режимов, которые комбинируются с существующими режимами полета - описано в разделе для разработчиков
