Предварительная проверка безопасности при снятии с охраны (Pre-arm Check)
APM с прошивкой 3.0.1 (и выше) включает в себя предварительную проверку безопасности при снятии с охраны, которая приводит к тому, что одна из проблем была выявленна:
- Проверяет, что была выполнена калибровка Радио.
- Проверяет, что была выполнена калибровка акселерометра.
- Проверяет, что компас здоровый и правильно передает данные.
- Проверяет, что смещение компасе не слишком большое (т.е. корень SQRT (х ^ 2 + у ^ 2 + Z ^ 2) <500).
- Проверяет, что калибровка на живую компаса или на базе журналирования была выполнена или что "COMPASS_LEARN" включен.
- Проверяет адекватное напряжение магнитного поля: (APM1/APM2 около 330, PX4/Pixhawk около 530)
- Проверяет, что барометр здоровый и правильно обменивается данными.
- Если круговая ограда (Fence) включена или снимаете с охраны в режиме Loiter проверка безопасности проверяет, что:
- у вас есть фиксация спутников по GPS
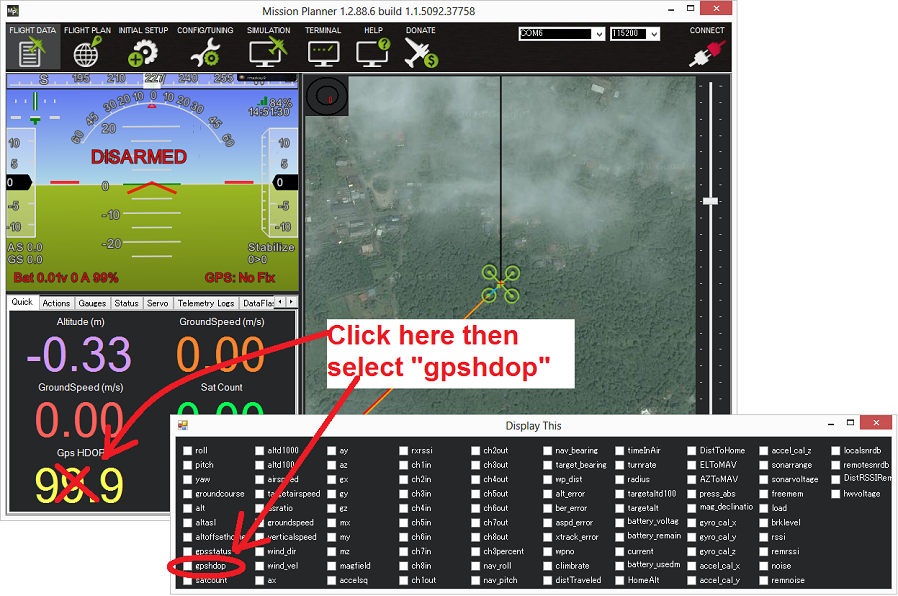
- параметр GPS HDOP < 2.0 (настраивается параметр GPS_HDOP_GOOD)
- Путевая скорость меньше 50 см / сек
- Проверяет, что полетный контроллер питается между 4,5 и 5,5 вольт для АРМ 1 или АРМ 2
- Проверяет, что 7 и 8 канал не настроен на управление на одну и ту же функцию.
- Если включен Radio FailSafe проверяет минимальное значение стика газа канала не ниже FS_THR_VALUE
- Проверяет параметр ANGLE_MAX (т.е. максимальный угол наклонав большинстве режимов) является больше 10 и меньше 80 градусов
- Проверяет уровень PWM по четырем первым каналам , если они меньше 1300 и не больше 1700
Если все остальное нормально, за исключением того, когда вы пытаетесь снять с охраны (Arming) стиком газа вниз и вправо (режим Mode2 на аппаратуре), он будет на самом деле не сниматься с охраны и двигатели не будут вращаться он, вероятно, не прошел проверку Pre-Arm безопасности. Вы должны заметить, что красный светодиод будет мигать двумя быстрыми вспышками по кругу.
Видео с подробным описанием Pre-Arm safety check
Отключение Pre-Arm Safety Check
Если вы уверены, что проверка на сбок не настоящая проблема вы можете отключить её:
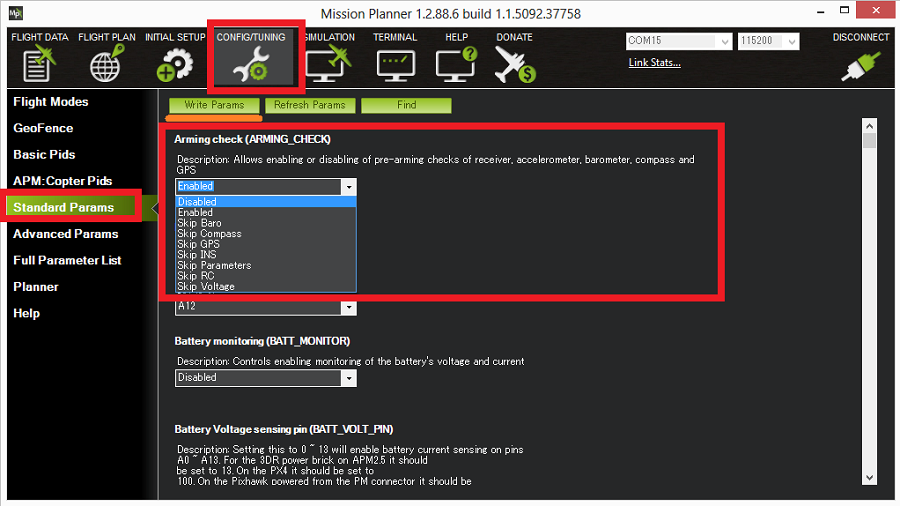
- Подключение APM к Mission Planer
- Зайдите в раздел Config/Tuning -> Standart Params
- установитe Pre-Arm Check на значение "Disabled" или, если вы используете AC3.1 (или выше), вы можете пропустить этот пункт, который вызывает сбой.
- Нажмите кнопку "Write Params"
В идеале вы должны определить причину сбоя Pre-Arm, и если она может быть решена, верните этот параметр к исходному положению - "Enabled"
Чтобы понять, что вызвало сбой Pre-Arm Check:
- Подключите свой полетный контроллер к компьютеру через порт USB.
- Запустите Mission Planner и соединитесь с ArduPilot нажав кнопку "Connect" в правом верхнем углу.
- Включите аппаратуру радиопередатчика и удерживайте стик газа вниз и вправо (процедура постановки на охрану - Disarm).
- Первый причиной проверки отказа Pre-Arm безопасности будет отображаться красным цветом в окне HUD Mission Planner.
- Каждая проблема и адрес будет сообщаться при попытке снять с охраны, как указано выше.
- Когда все проблемы были исправлены, вы увидите проверку "снятия с охраны" (Pre-Arm Check) в окне HUD.
- После этого можно отключить от компьютера и имеють хорошую гарантию того, что снятие с охраны (arming) будет происходить в обычном режиме.
Устранение проблем предварительной проверки снятия с охраны (Pre-arm fix):
- Если не прошла проверка Радио rалибровки - сделайте повторно калибровку радио .
- Если не прошла проверка калибровки акселерометра - сделайте повторно калибровку акселерометра .
- Если происходит сбой компаса - сделайте заново живую калибровку компаса .
- Если проверка барометра (высотомера) не работает, то ваш контроллер скорее всего имеет аппаратную проблему с барометром.
- Если проверка позиция GPS не удалась
- ждать HDOP вашего GPS, чтобы он опустился ниже 2.0, прежде чем пытаться снимать с охраны. Вы можете сделать это более легко - наблюдая в области быстрого экрана Mission Planner.
- Отключите Geofence в Config/Тюнинг -> Geofence
- Снимите с охраны (arming) в полетный режим Стабилизации (Stabilize mode) и позже перейдите в режим Loiter (этот режим (loiter) не рекомендуется на момент старта, потому что хорошая фиксация по спутникам GPS требуется для Loiter и HDOP является хорошим показателем того, что GPS позиция хороша)
- увеличить параметр GPS_HDOP_GOOD от 200 до 250 (это также не рекомендуется по тем же причинам, что и выше)
- Если проверка напряжения питания полетного контроллера не успешная:
- проверить UBEC , который используется для подачи напряжения на АРМ напряжение должно быть между 4,5 и 5,5 вольт (чем ближе к 5V, тем лучше)
- проверить, если какие-либо периферийные устройства, которые питаются от АРМ и имеют слишком высокий потребляемый ток.
- Если на канал 7 и 8 было установлено тоже самое (одинаковая функция) измените один из них с помощью Mission Planner Config/Тюнинг -> PIDS