Измерения вибрации
Для режимов удержания высоты и Loiter важно, что бы ваши уровни вибрации были низкими. В приведенных ниже инструкциях показано, как измерить уровень вибрации. Если вы обраружите , что они выше положеных следуйте советам и настройке на странице гашения вибрации
Пожалуйста , выполните следующие шаги для обеспечения иследования уровня вибрации:
- Подключите APM к Mission Planner
- Перейдите в Config / TUNING -> Standart Params и установите в разделе "Log Bitmask (LOG_BITMASK)" значение Default+IMU . Это позволит записать данные с акселерометра в журнал APM.
- Нажмите кнопку "Write Params"
- Полетайте на вашем квадрокоптере в режиме стабилизации и старайтесь его удерживать на месте (но не нужно быть совершенно стабильным)
- Отключите LiPo батарейку, подключите APM к Mission Planner.
- Загрузите последний журнал данных с памяти полетного контроллера (как это можно сделать описано тут)
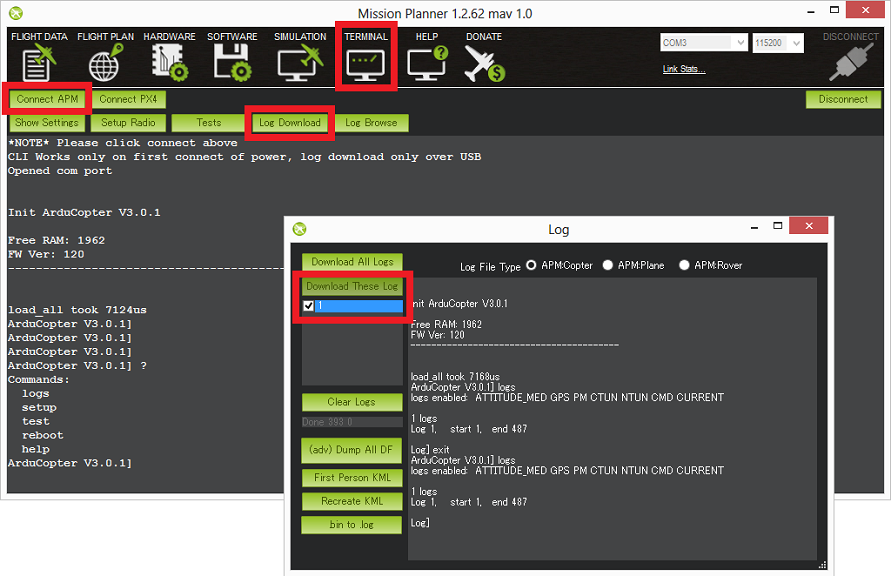
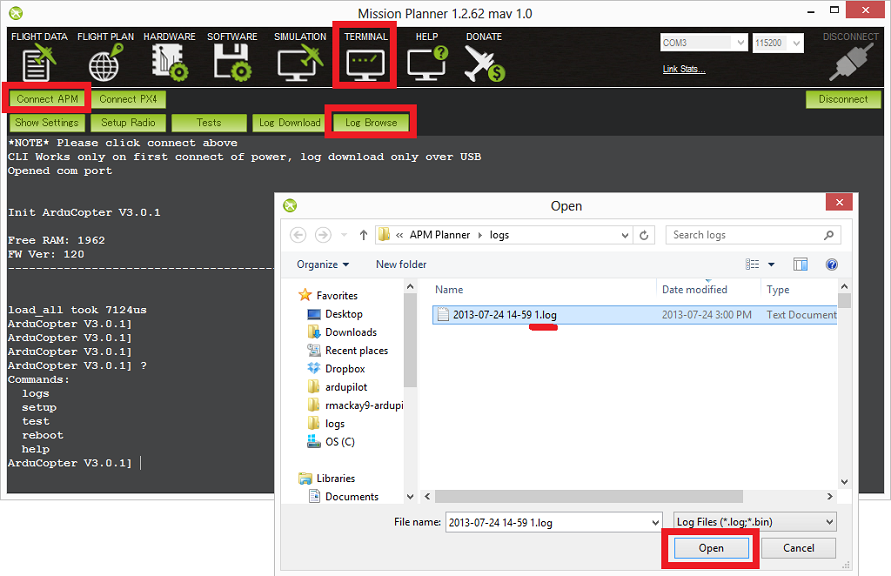
- После завершения загрузки логов , закройте окно "Log" и нажните кнопку "Log Browse" и откройте последний файл журнала.
- Когда вы откроете лог, прокрутите вниз и выберите любое IMU сообщение. Нажмите на столбец AccX и нажмите на кнопку "Graph this Left". Повторите эти действия для столбцов AccY и AccZ для построки графика , как показано ниже.
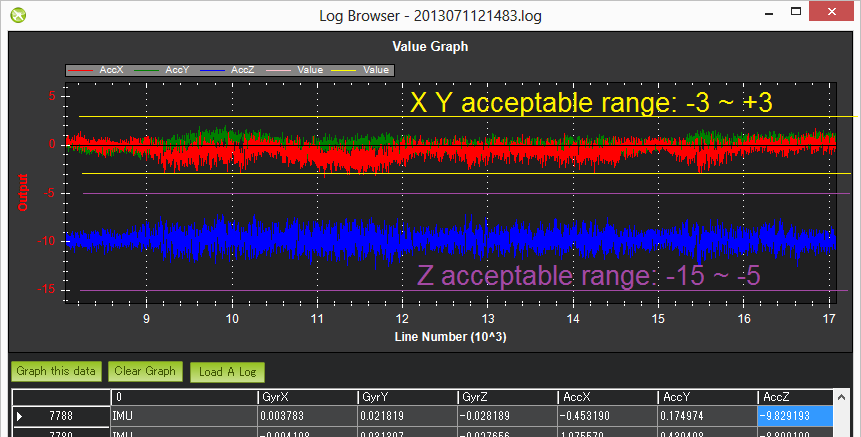
- Проверьте масштаб слева и убедитесь, что ваши уровни вибрации для AccX и AccY в районе от -3 до +3. Для AccZ приемлемый диапазон от -15 до -5. Если Ваши показания превышают указанные нормы - посетите страницу решения поглощения вибрации.
- После того, как вы завершите изучения логов подключитесь Mission Planner к APM и перейдите в разел Standart Parametrs для востановления Bitmask в Default (это нужно для того, что бы в журнал не писалась информация по уровню вибрации).
